
Projects

Modeling and Analysis of Biological Signals
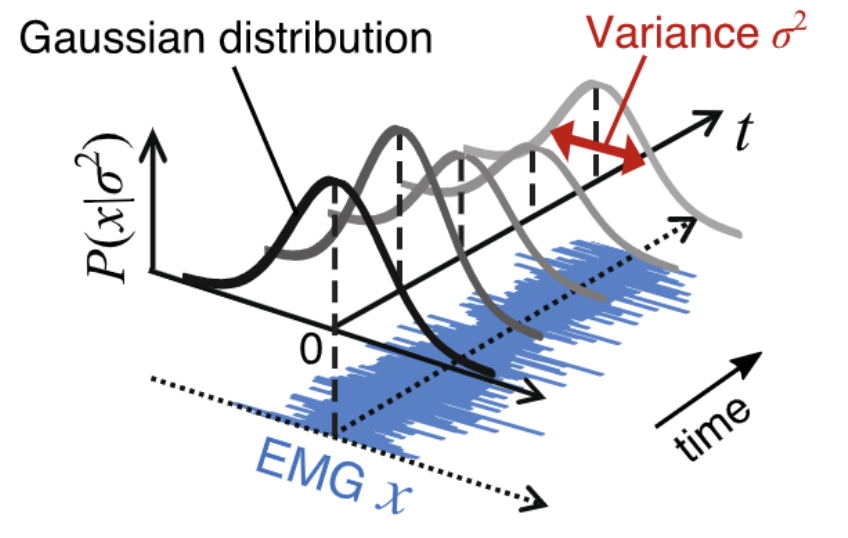
Stochastic Model of Surface EMG and Signal Analysis
Surface EMG signals generated during muscle contraction contain a variety of information related to human movement intention and muscle contraction. In this study, we focus on the uncertainty of the variance of the EMG signals, and construct a stochastic generative model that can represent this uncertainty, in order to create a novel signal analysis method.
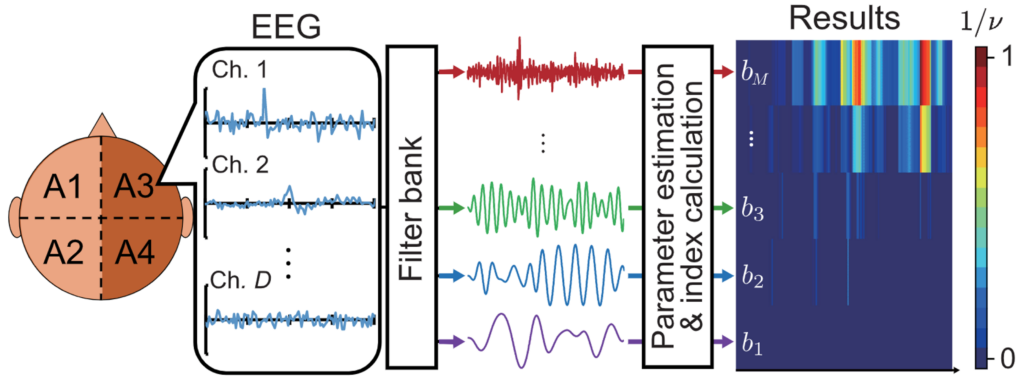
Stochastic Model of EEG and Signal Analysis
Electroencephalogram (EEG) is a measurement of the electrical activity generated by the brain from the scalp. EEG shows characteristic waveform patterns depending on the brain state. In this research, we are developing an approach based on a probabilistic generative model to discover and analyze such characteristic waves of EEG with high accuracy.
Machine Learning / Deep Learning
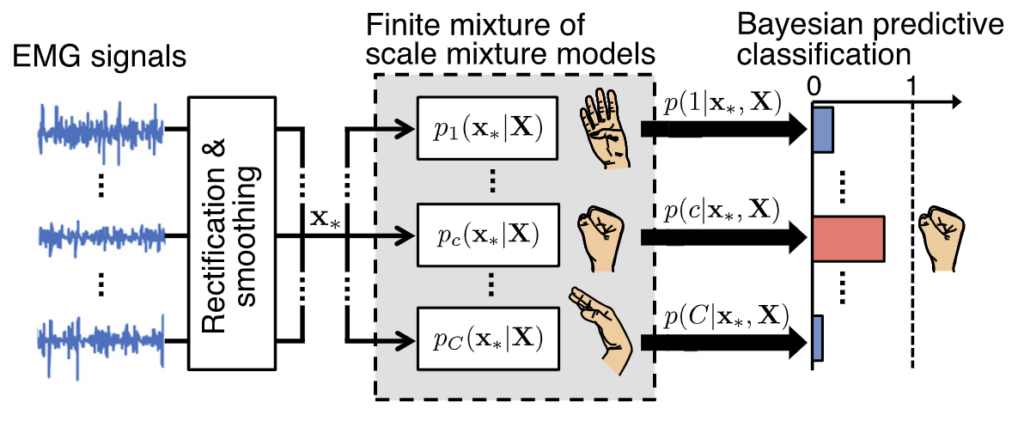
Motion Pattern Recognition using EMG Signals
If we could decode human motion intentions from EMG signals, the control of various devices would be realized based on such decoded information. In this research, we develop a pattern recognition algorithm that includes a probabilistic generation model of EMG signals, and aim to achieve highly accurate motion recognition by learning and inference that takes into account the properties of EMG signals.
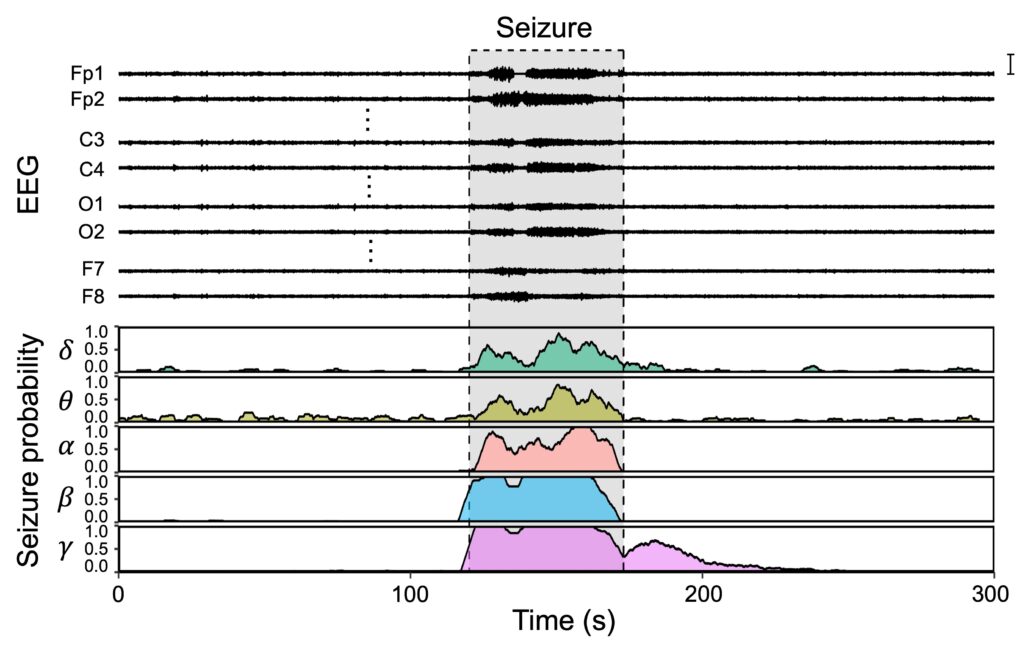
Time-series Prediction of Epileptic Seizure Based on EEG
Epileptic seizures are caused by abnormal electrical activity of nerve cells in the brain, sometimes resulting in loss of consciousness or convulsions. In this research, we develop an algorithm that can predict seizure probability sequentially by introducing a time series structure into the probabilistic generation model of EEG.

Human-machine Interface
Myoelectric Robotic/Prosthetic Hand mimicking human motor characteristics
We are developing a robotic myoelectric prosthetic hand that can drive five fingers independently. In addition to a highly accurate motion discrimination algorithm based on EMG signals and machine learning, we are introducing a control model that mimics human motion characteristics, aiming to realize a system that can be operated intuitively and naturally by the user.