Tactile Sensors for Quantitatively Evaluating Tactile Properties of Fabrics |
[projects] [top] [Japanese] |
Abstract
Tactile properties of object surfaces that we feel through touching them are very difficult to describe in quantitative/objective measures. Even today, evaluation of such properties depends on either of expert skills or expensive precise measurement devices. Making such evaluation process simpler and more reliable will contribute the reduction of production costs and the sustainment of production qualities.
In this research, we are developing tactile inspection systems for inspection processes in the industry, especially of fabrics. Our main interest is to realize compact, low-cost, easy-to-use devices that can be used in hand-held or finger-mounted manners.
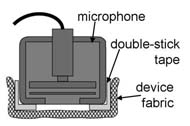 Tactile sensor A |
 Tactile sensor B |
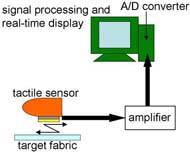 Instrumentation system |
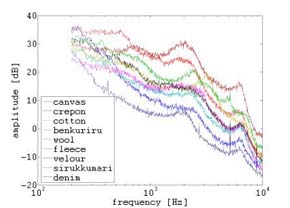 Vibration spectra obtained from 9 different fabrics |
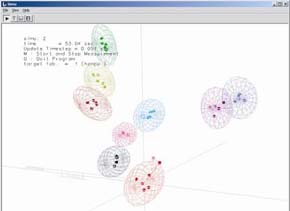 3D representation of the data from 9 different fabrics |
Papers
- Ryo Kikuuwe, Kenta Nakamura and Motoji Yamamoto:“Finger-Mounted Tactile Sensor for Evaluating Surfaces,” Journal of Robotics and Mechatronics, Vol.24, No.3, pp.430-440, June 2012.
- Kenta Nakamura, Ryo Kikuuwe, Fumihito Tabuchi, and Motoji Yamamoto. "Finger-wearable tactile sensor for discriminating surface properties of objects," Proceedings of JSME Robotics and Mechatronics Conference 2009, May 2009.
- Ryo Kikuuwe, Fumihito Tabuchi, and Motoji Yamamoto. "Identification of Fabrics by Using Frictional Sounds between Fabrics," Proceedings of JSME Robotics and Mechatronics Conference 2008, 1P1-I03, May 2008.
- Fumihito Tabuchi, Ryo Kikuuwe, and Motoji Yamamoto. "Quantifying Difference among Fabrics Based on Vibration Induced by Friction between Fabrics," Proceedings of SICE System Integration Division Anual Conference, 2A3-4, December 2007.