New Computational Methods for Simulating Friction and Plasticity |
[research] [top] [Japanese] |
Drift-free, chattering-free friction models especially for fixed-step simulations, haptic rendering, and human-machine coordination.
  |
||
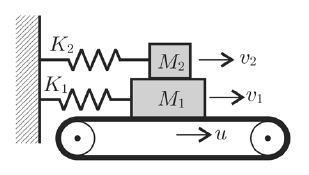
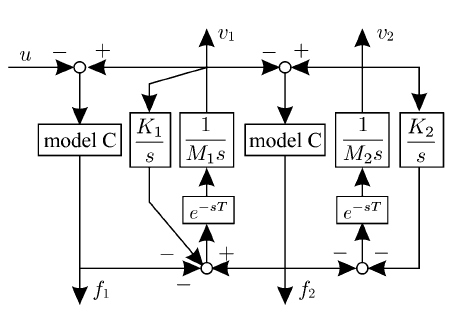
| Simulation of a stick-slip phenomenon using two Model-C elements. | ||
|
|
| ||
| A needle insertion simulator based on the Model C. It presents friction forces between the needle and soft tissues through a haptic device. It also presents a "pop," which is a sudden loss of the force felt when the needle penetrates a tissue layer. | |||
 Snapshot of the simulator |
 Experimental setup (Logitech G25 Raching Wheel) |
Literature on Discrete-Time Friction (Plasticity) Models
Basic Techniques
-
Ryo Kikuuwe, Naoyuki Takesue, Akihito Sano, Hiromi Mochiyama, and Hideo Fujimoto: “Admittance and Impedance Representations of Friction Based on Implicit Euler Integration,” IEEE Transactions on Robotics, 22(6), pp. 1176-1188, December 2006.
- [pdf file]
©2006 IEEE. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.
- This TRO paper is most detailed in regard to my friction/plasticity models. Which of the Models A to D should be used is detailed in section IV.
- [pdf file]
-
Ryo Kikuuwe, Naoyuki Takesue, Akihito Sano, Hiromi Mochiyama, and Hideo Fujimoto: “Fixed-Step Friction Simulation: From Classical Coulomb Model to Modern Continuous Models,” In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2005), pp. 3910-3917, August 2005 (Edmonton, Canada).
- [pdf file]
©2005 IEEE. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.
- [pdf file]
-
Ryo Kikuuwe: “Embedding Nonsmooth Systems in Digital Controllers,” Presentation at KAIST-Kyushu University Joint Seminar 2008 (20/Sep/2008).
- [PDF file]
- This slide overviews the mathematical background of the friction model and the proxy-based sliding mode control.
Applications
-
Ryo Kikuuwe, Yu Kobayashi, and Hideo Fujimoto: “Coulomb-Friction-Based Needle Insertion/Withdrawal Model And Its Discrete-Time Implementation,” In Proceedings of EuroHaptics 2006, pp. 207-212, July 2006 (Paris, France).
- [pdf file]
- Injection simulator with haptic feedback demonstrated in the above video.
-
Ryo Kikuuwe, Naoyuki Takesue, and Hideo Fujimoto: “A Control Framework to Generate Nonenergy-Storing Virtual Fixtures: Use of Simulated Plasticity,” IEEE Transactions on Robotics, 24(4), pp. 781-793, August 2008.
- [pdf file]
©2008 IEEE. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.
- Plasticity-based virtual fixtures. They are intrinsically safer than elastic fixtures but can be accurate guides because they act as hard walls.
- [pdf file]
-
Ryo Kikuuwe, Naoyuki Takesue, and Hideo Fujimoto: “Passive Virtual Fixtures Based on Simulated Position-Dependent Anisotropic Plasticity,” In Proceedings of the 2007 IEEE International Conference on Robotics and Automation (ICRA 2007), pp. 3263-3268, April 2007 (Rome, Italy).
- [pdf file]
©2007 IEEE. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.
- This conference paper is a preliminary version of the forthcomming TRO paper above. Reviewers for the above TRO paper suggested that the term "passive" does not fit to this concept of plasticity-based virtual fixtures. So I decided to use the term "non-energy-storing" instead in the above TRO paper.
- [pdf file]
Ryo Kikuuwe's Homepage